Scaling Material Urban Commons (2021-2024) was a critical making project that explored pathways towards just algorithmic governance of urban resources in a time of extractivist and biased algorithms. The project was hosted by the Critical Media Lab Basel. It rehearsed collective machine teaching and community-based data practices to distribute rescued food.
The research team used design fiction writing, speculative artefacts, explorative coding and participatory design research workshops to create imaginaries of algorithmic infrastructures that turn resources into commons.
The main project outcomes were the smuc.kitchen Field Test, the Machine Teaching Commons / Teaching Machine Commons Exhibition with accompanying symposium, and publications.
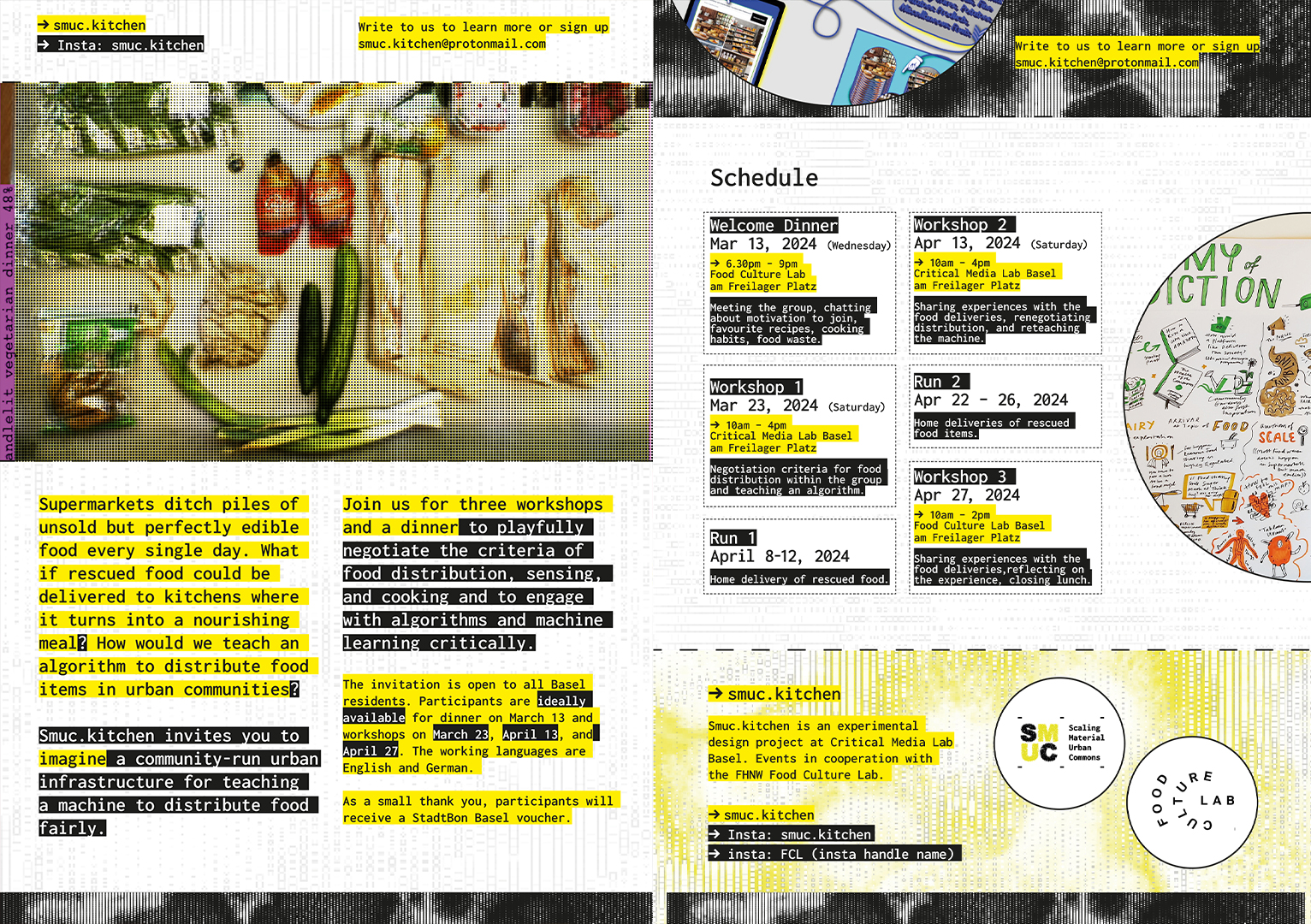
The smuc.kitchen Field Test used participatory design and creative coding to explore community-based machine teaching for the distribution of rescued food. The six-week Field Test consisted of socialising events, three Assembly meetings, and two one-week-long phases of food deliveries. Basel-based food rescue organisation FoodAngels provided the food for the deliveries. Participants formed an Assembly to negotiate the distribution of rescued food and to teach the Food Distribution Engine to orchestrate it.


Food Distribution Engine
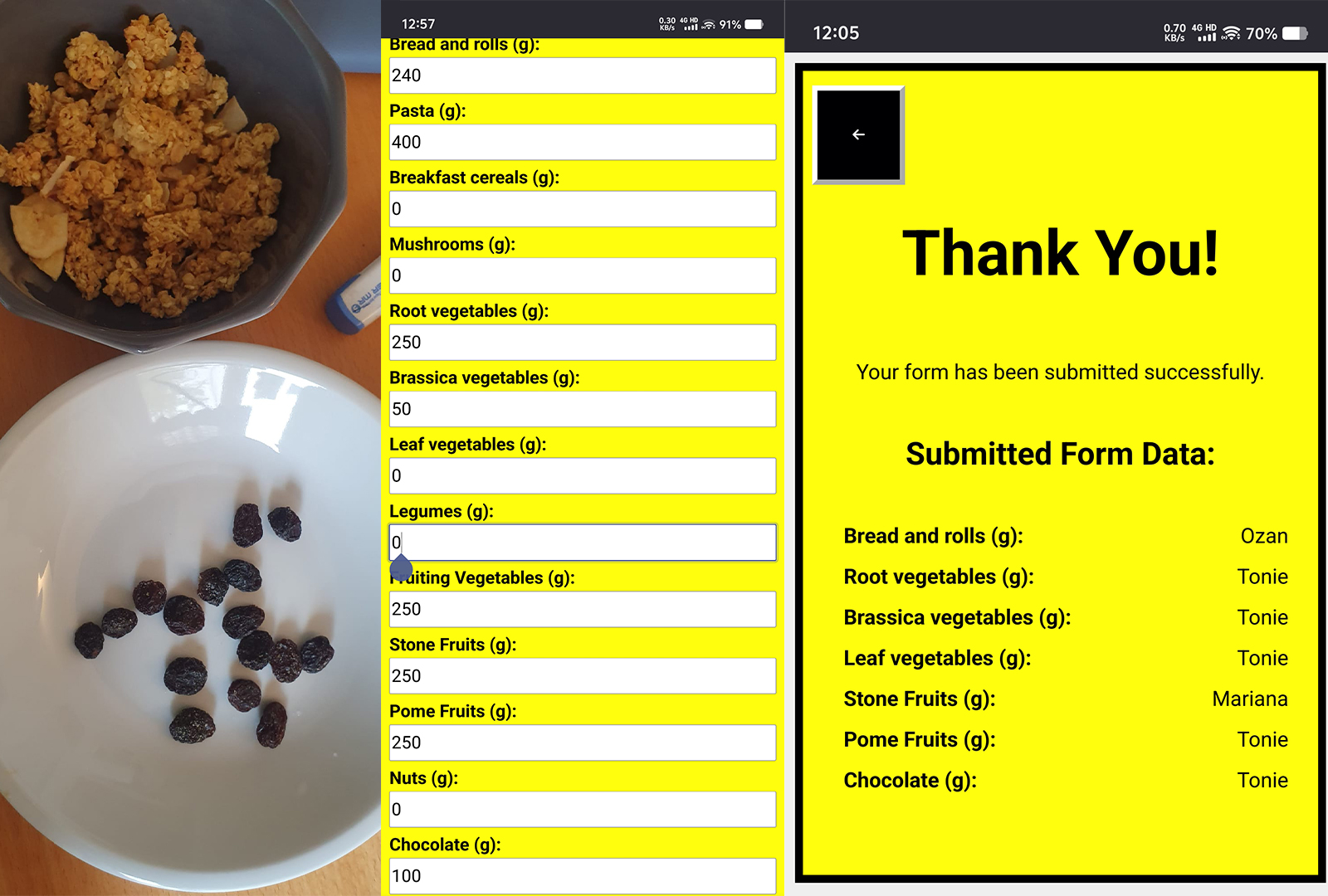
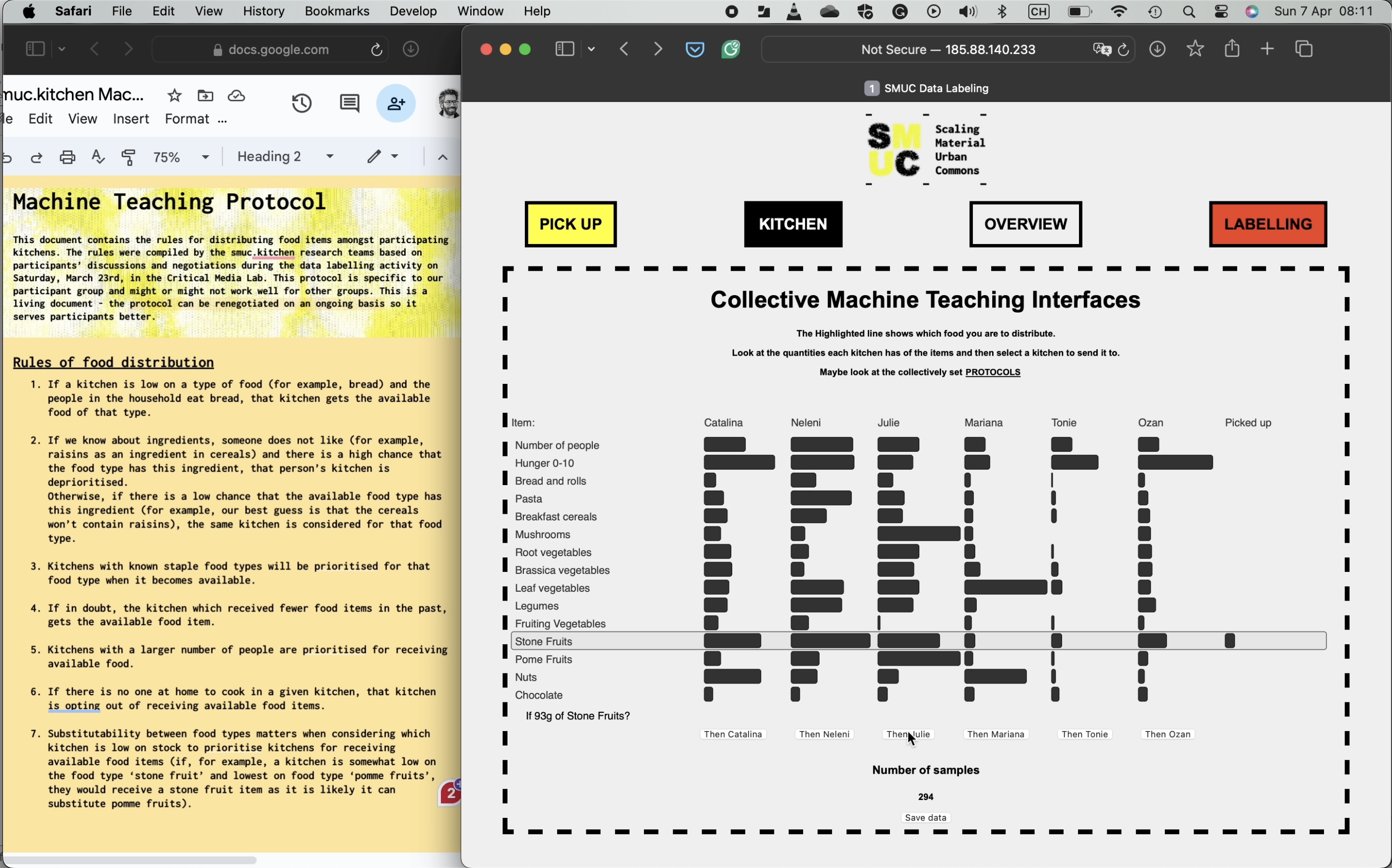
The main components of the Food Distribution Engine were a FoodAngels-facing interface for entering available rescued food items (Pick up tab on the interface), a participant-facing interface for entering food type and quantity available in kitchens (Kitchen tab), data labelling (Labelling tab) and training distribution models (Training tab), and choosing the distribution model to use for next day's distribution (Model tab).
You can explore the Food Distribution Engine's interface here.
The data labelling function emerged as the key feature of the Food Distribution Engine. Through enabling participants to generate their training data for the Engine’s classification algorithm, community-based labelling increased their autonomy over the models, a key aspect of inviting algorithms into commoning.
The SMUC team developed the Food Distribution Engine and corresponding smuc.kitchen interface in collaboration with George Simms and Mahinya Mkwawa.

Rescued Food Deliveries
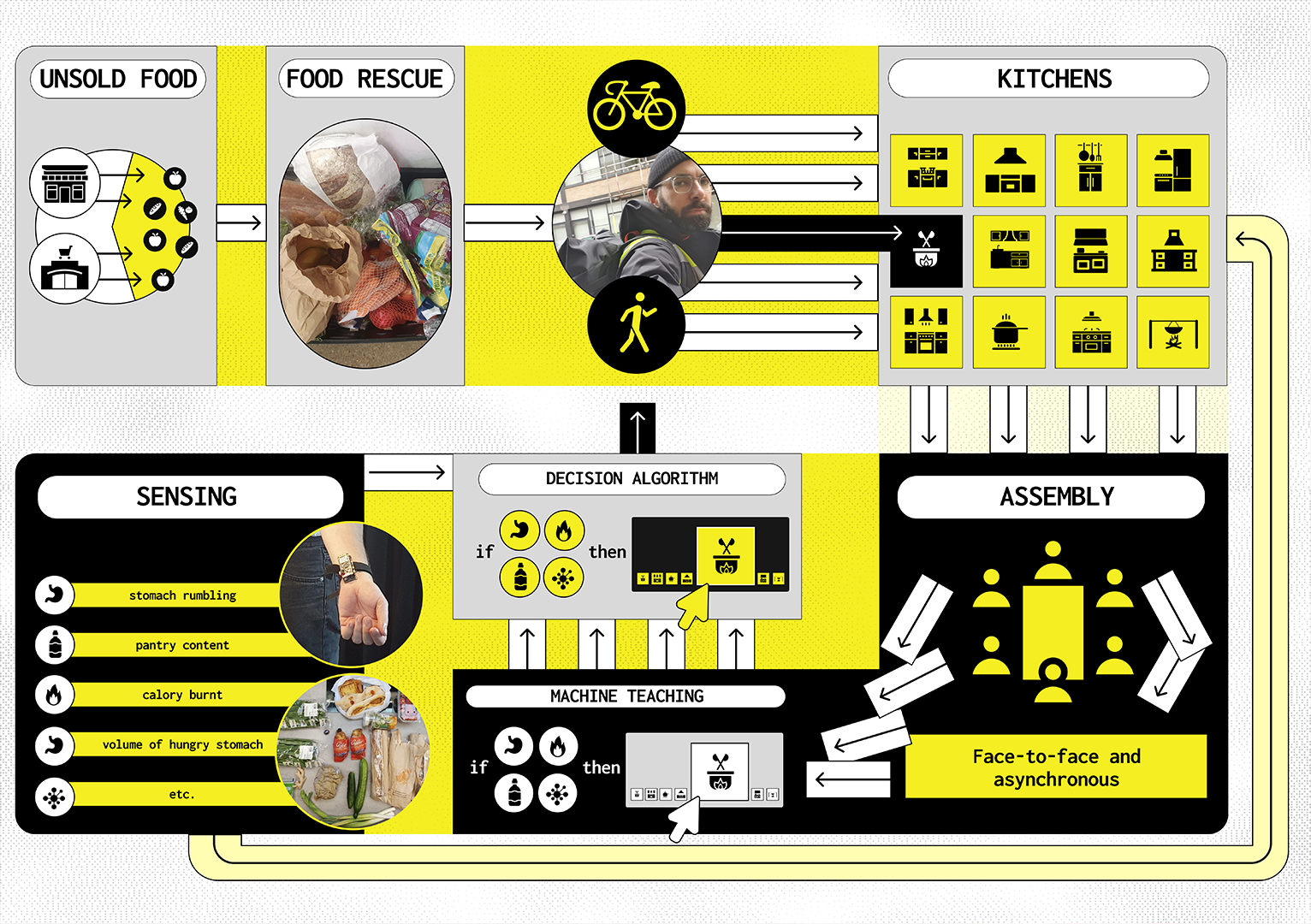
In Basel, unsold food is abundantly available for collection. Rescued food is a resource ready to be turned into commons. FoodAngels made daily collections from their partnering supermarkets and sorted collected food in its depot based on appearance and smell. FoodAngels then prepared food boxes containing canned goods, fresh produce, bread, or chocolate. Using an electric cargo bike, they delivered the boxes to participants' doorsteps, guided by the responses from the Food Distribution Engine.



Machine Teaching in the Assembly
The Field Test Assemblies were sessions of story-sharing (cooking habits, nutritional preferences, recipes, views about food waste, health) and decision-making, similarly to Assemblies of housing cooperatives or community gardens. Additionally, the research team provided inputs about the use and background of the Food Distribution Engine.
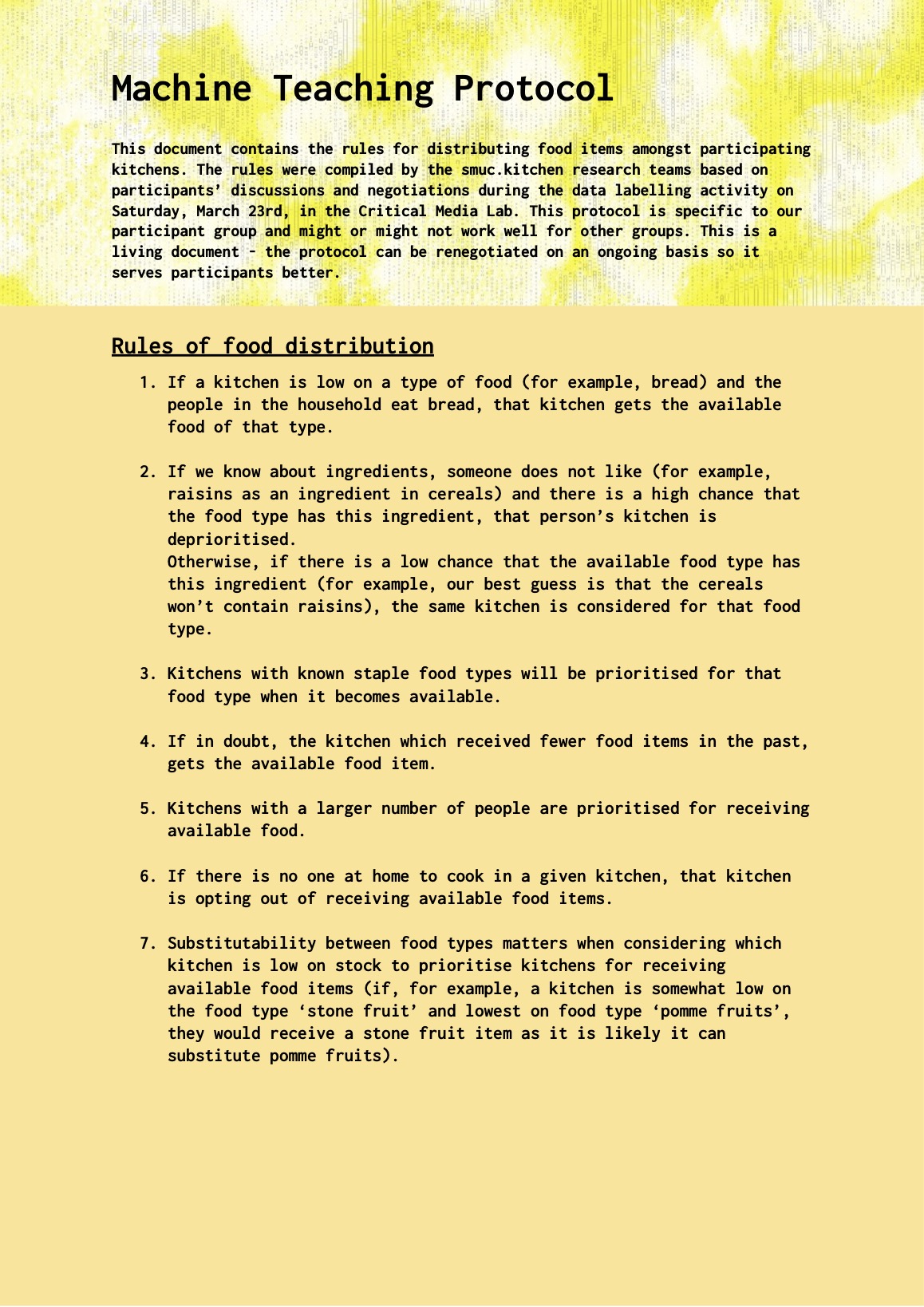
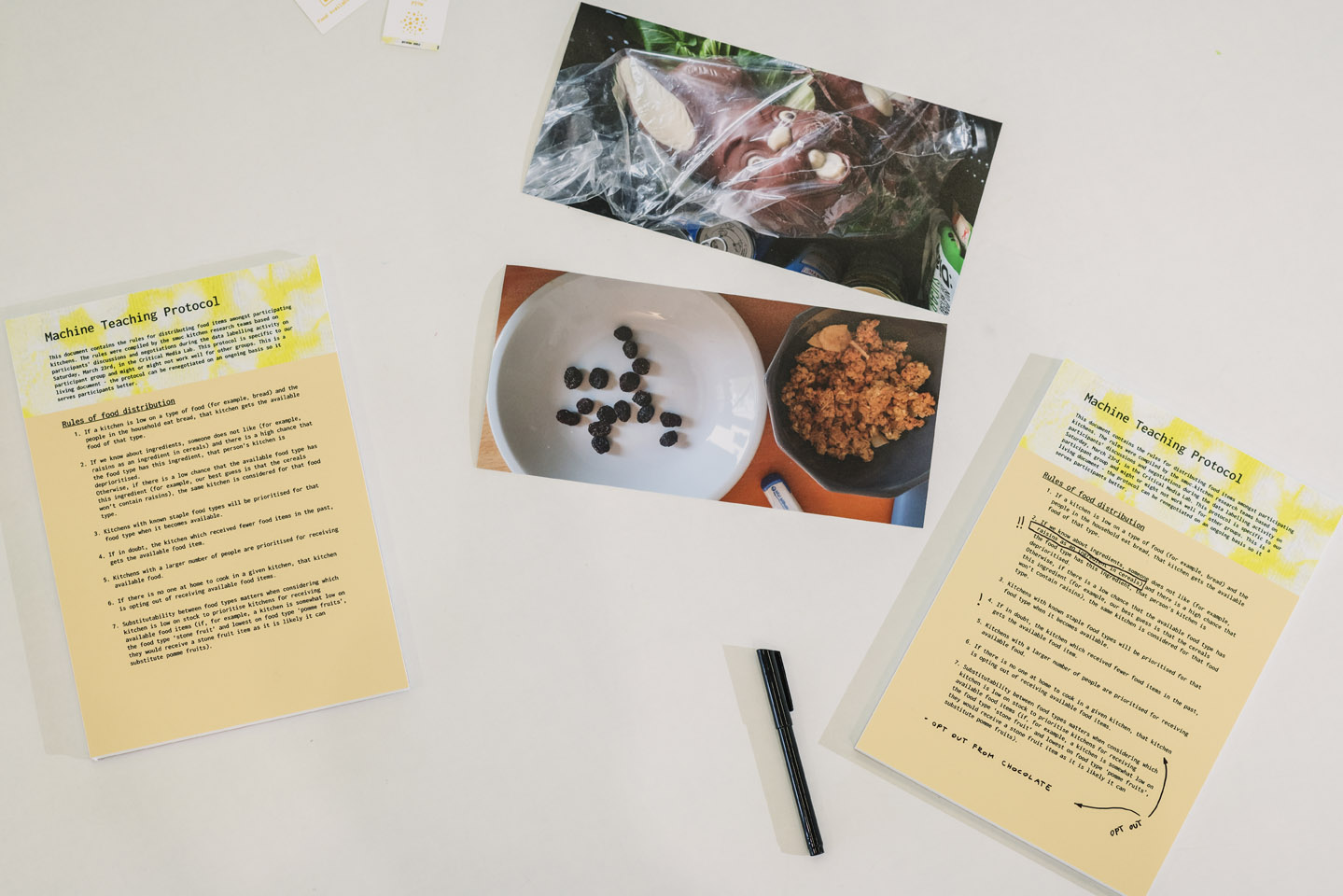
The Assembly negotiated principles of food distribution, which it captured in the ‘Machine Teaching Protocol’. The Machine Teaching Protocol was a living document containing about half a dozen rules such as ‘If a kitchen is low on a type of food (for example, bread) and the people in the household eat bread, that kitchen gets the available food of that type.’ or ‘Substitutability between food types matters when considering which kitchen is low on stock to prioritise kitchens for receiving available food items’.
The Machine Teaching Protocol provided the basis for collectively producing training data through manual data labelling, a key component of collective machine teaching.

Training Data By Collective Labelling
Participants used the data labelling section of the Food Distribution Engine’s interface to generate training data. The interface showed the individual kitchens with a visualisation of the amount of ingredients they had in their fridges and pantries, like a snapshot of every kitchen’s inventory at a given moment. Additionally, the interface showed the amount and type of food (for example, ‘legumes 150 grams’) to be assigned to one of the kitchens. (Before enough real-time data had accumulated during the Field Test, a Data Generator fed the interface with synthetic data). Data labelling meant that participants assigned the rescued food items to kitchens based on the snapshot of the inventories and their understanding of how the Machine Teaching Protocol would apply. The inventory snapshots labelled with kitchens constituted the training data for the classification algorithm behind the Food Distribution Engine’s distribution model. During the Field Test, participants labelled slightly more than a thousand data points altogether.
During the week, participants exchanged experiences or recipes (such as mango pies, tomato paste bruschetta, and asparagus curries) or asked for assistance via a dedicated group in a messaging app. After the first Delivery Week, the group gathered again for a second Assembly meeting to iterate the Machine Teaching Protocol and re-teach the machine by generating updated training data.
Takeaways
Collective manual labelling to generate training data emerged as a key aspect of the Field Test. Participants translated the collectively negotiated protocols of food distribution into algorithmic classification through labelling which constituted machine teaching.
The participant-generated data and the collective machine teaching enhanced participants' autonomy over the algorithm, and mitigated external data biases. It also revealed a pathway towards countering extractivist algorithms, as participants captured the value generated by the Food Distribution Engine within the commons.
However, the Field Test also revealed the labour intensity of generating data about kitchens and the labelling activity itself, posing further questions about small data, implicit and affective aspects of negotiations in the Assembly getting lost in translation during labelling large amounts of data.
On a hopeful note, the Field Test also suggested that under conditions of serendipitous food deliveries participants prided themself in skillfully substituting ingredients in their favourite recipes. The joy of flexible cooking hints at pathways towards principles of good enough prediction in collective machine teaching efforts that counter the drive to ultimate optimisation.









The Machine Teaching Commons / Teaching Machine Commons (MTC/TMC) exhibition presents the key creative outcomes of the Scaling Material Urban Commons project. Central to the exhibition is a speculative machine-teaching-based infrastructure for commoning rescued food, enlivened by the promises and perils of site- and community-specific algorithms for governing urban resources. The exhibition explored this infrastructure as a stack consisting of four layers: Kitchens, Assembly, Data-labelling, and Algorithmic Logistics. The exhibition situates this infrastructure in relation to other research-based creative works, highlighting the evolving and entangled praxis for safeguarding autonomy in working with algorithms. Curator: Viktor Bedö Co-curator: Jaz Choi Opening: June 19th 2024. 6 pm. CIVIC space at FHNW Academy of Art and Design, Freilager-Platz 1, Basel Dedicated MTC/TMC Exhibition website coming soon.
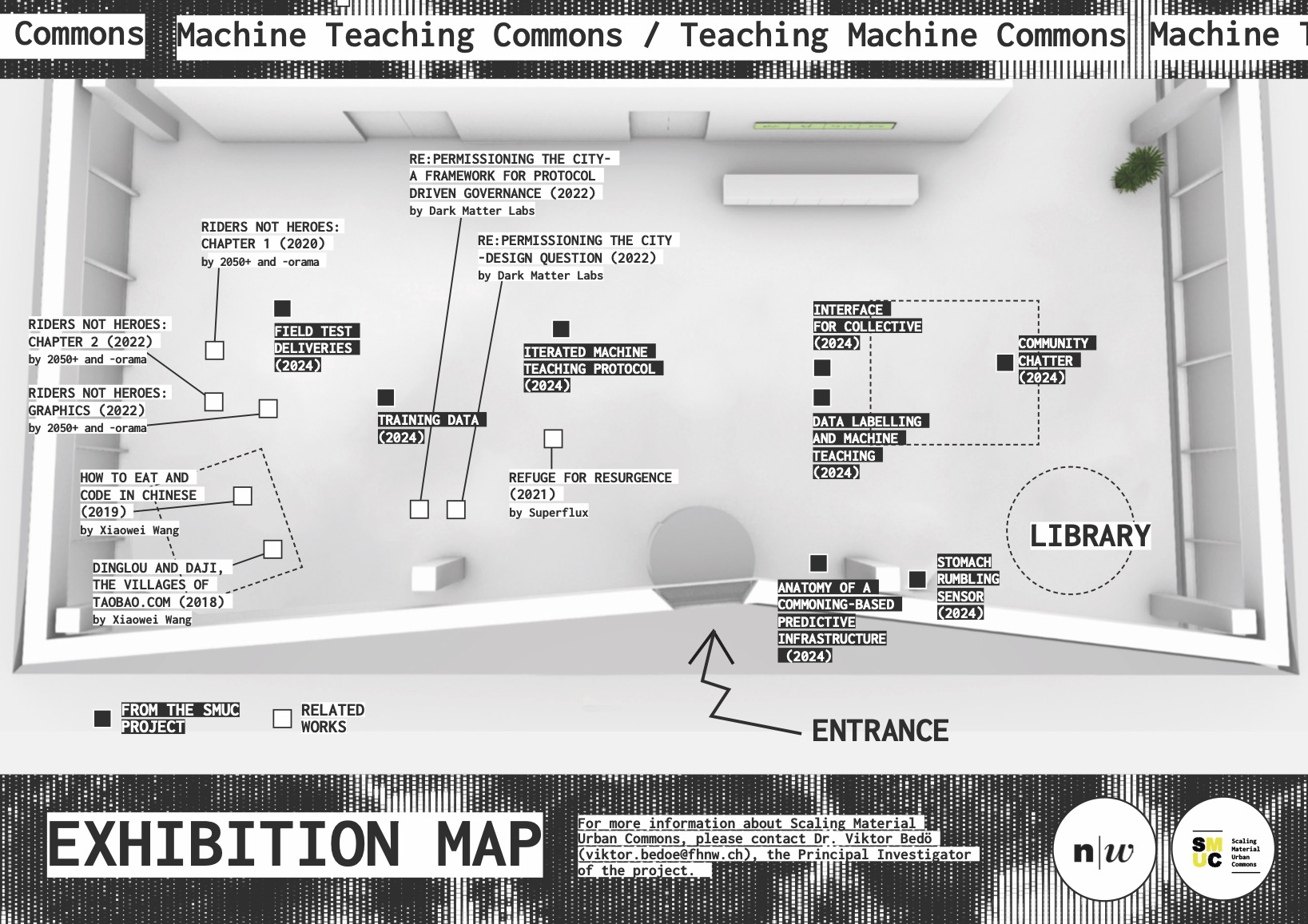
Exhibited Works From the SMUC Project 1. Iterated Machine Teaching Protocol (2024) 2. Community Chatter (2024) 3. Anatomy of a commoning-based predictive infrastructure (2024) 4. Stomach Rumbling Sensor (2024) 5. Interface for Collective (2024) 6. Data Labelling and Machine Teaching (2024) 7. Training Data (2024) 8. Field Test Deliveries (2024) Related Works 9. Riders Not Heroes: Chapter 1 (2020) by 2050+ and -orama 10. Riders Not Heroes: Chapter 2 (2022) by 2050+ and -orama 11. Riders Not Heroes - Graphics (2022) by 2050+ and -orama 12. Re: Permissioning the City - A Framework for Protocol Driven Governance (2022) by Dark Matter Labs 13. Re: Permissioning the City - Design Question (2022) by Dark Matter Labs 14. Refuge for Resurgence (2021) by Superflux 15. How To Eat and Code in Chinese (2019) by Xiaowei Wang 16. Dinglou and Daji, the villages of Taobao.com (2018) by Xiaowei Wang
The Machine Teaching Commons / Teaching Machine Commons Symposium accompanied the MTC/TMC Exhibition on June 20th 2024 and took place in the AULA, 1st floor at FHNW Academy of Art and Design, Freilager-Platz 1, Basel.
Symposium speakers and agenda:
9:00: Arriving
9:30 — 10:00: Opening by Helen Pritchard
10:00 — 11:00: Opening talk by Viktor Bedö
11:00 — 11:15 Break
11:15 — 12:45: Panel round 1 with Rebecca Fiebrink, Eunji Kang, Oona Morrows; moderated by Viktor Bedö
12:45 — 14:00: Lunch break
14:00 — 15:30: Panel round 2 with Xiaowei Wang, Ippolito Pestellini Laparelli and Jaz Choi; co-moderated by Jaz Choi and Viktor Bedö
15:30 — 16:00: Workshop in the exhibition space
Machine Teaching Commons / Teaching Machine Commons was a one-day symposium and exhibition presenting key outcomes of the smuc.kitchen project. The event also aimed at opening new collaborative pathways with researchers, creatives and research-based art practitioners who have been exploring the promise and perils of site- and community-specific algorithms for governing urban resources as well as practices of safeguarding autonomy in working with algorithms.
The smuc.kitchen Field Test used participatory design and creative coding to explore community-based machine teaching for distributing rescued food. The smuc.kitchen Field Test utilised a Food Distribution Engine and respective interfaces and employed custom-made IoT Prototyping Cards for developing the infrastructure.
The Food Distribution Engine and its interfaces are experimental software that are part of the infrastructure for algorithmic commoning of rescued food. They are boundary objects for understanding and scrutinising protocols, autonomy and labour in collective machine teaching. At the same time, the Food Distribution Engine is a proof of concept prototype for the collective algorithmic management of material resources. You can explore the Interface here and learn more about the context here. Code on FHNW Gitlab here.
The Pantry Data Generator is an explorative software prototype that synthesises a data stream about kitchens (pantry contents), to be used as training data for machine learning projects related to cooking, meals and recipes. Statistical data from the European Food Safety Authority’s Comprehensive Food Consumption Database provides the grounds for the synthesised data stream. Code on FHNW Gitlab Explainer pictorial.
The Food Distribution Engine and its interfaces are experimental software that are part of the infrastructure for algorithmic commoning of rescued food. They are boundary objects for understanding and scrutinising protocols, autonomy and labour in collective machine teaching. At the same time, the Food Distribution Engine is a proof of concept prototype for the collective algorithmic management of material resources. You can explore the Interface here and learn more about the context here. Cards for download on FHNW Gitlab Explainer pictorial.
Bedö, V. (2024). MealSense: A Fiction About Datafication and Algorithms in Commoning Food, in Gray, C., Ciliotta Chehade, E., Hekkert, P., Forlano, L., Ciuccarelli, P., Lloyd, P. (eds.), DRS2024: Boston, 23–28 June, Boston, USA. https://doi.org/10.21606/drs.2024.969 Loomes, Amanda, Rebecca Farkas, Riitta Oittinen, Sarah Matharu, Joyce Treasure, Elly Clark, and Viktor Bedö. (2023). ‘Dragging up an Exhibition: An Unlikely Cast of Characters’. doi:10.26041/FHNW-4859. Choi, Jaz Hee-jeong, Sara Heitlinger, Alex Taylor, and Viktor Bedö. (2022). ‘Towards Governance for Open Urban Food Futures’. In Routledge Handbook of Urban Food Governance, eds. Ana Moragues-Faus, Jill K. Clark, Jane Battersby, and Anna Davies. London: Routledge, 399–412. doi:10.4324/9781003055907-33. Bedö, Viktor. (2022). ‘Design F(r)Iction Für Food Rescue Infrastructures’. In Design × Nachhaltigkeit : Materialität / Systeme / Gerechtigkeit Berlin, Technische Universität Dresden, 96–97. doi:10.25368/2022.293. Bedö, Viktor. 2022. ‘I Am a Nettle: Approaching More-than-Human Service Design’. doi:10.26041/FHNW-4289. Bedö, Viktor, and Jaz Hee-Jeong Choi. (2021). ‘Predictive Tech in Scaling Material Urban Commons’. In Fachhochschule Nordwestschweiz FHNW. doi:10.26041/FHNW-4061.
Conference presentation Amsterdam July 2024 Viktor Bedö, Kit Braybrooke, Gabriela Aquije and Ruth Catlow: Staying with the struggle: Possibility, contingency and failure in three speculative more-than-human worldings that attempt to speak-with at the conference Making and doing transformation of European Association for the Study of Science and Technology (EASST) and the Society for Social Studies of Science (4S). Workshop input Basel July 2024 Viktor Bedö gave an short presentation about the limits of embodied knowledge in training machines at the Responsibility in Postnatural Environments workshop of the Mitwelten research project at Critical Media Lab Basel. Conference presentation Boston June 2024 Viktor Bedö: MealSense: A fiction about datafication and algorithms in commoning food at the 2024 Design Research Society's Conference 'Resistance, Recovery, Reflection, Reimagination' Workshop Muttenz June 2024 Ayling Tcheope and Viktor Bedö co-facilitated the workshop Lebendige Infrastrukturen in der essbaren Stadt: soziotechnische Commoning Praktiken und sorgsame Wissensproduktion für eine nachhaltige Zukunft at the Symposium Urban Space in Digital Transformation: Between Tomorrow's Smart City and Practices of Resistance. Workshop London 2024 Viktor Bedö gave an impulse lecture and facilited a workshop about place, meals and more-than-human perspectives at the Meals Without an Address event of Goldsmiths, University of London's Kitchen Research Unit. Workshop Rotterdam December 2023 Viktor Bedö and Yann Martins: Collective Machine Teaching Workshop @ ThingsCon December 2023: The Labelling For the Food Commons workshop at Thinsgcon 2023 engaged participants in an experimental machine-teaching activity to investigate the struggle of keeping communities in the cybernetic loop of automating the fair distribution of rescued food. Panel discussion Basel September 2023 SMUC hosted the Panel Discussion Anatomy of a Commoning-Based Predictive Infrastructure with Kit Braybrook and Torange Khonsari at HackThePromise Festival. The panel addressed the characteristics of commoning-based algorithmic urban futures opposed to extractivist approaches. Workshop Basel September 2023 SMUC hosted the wokrshop Anatomy of a Commoning-based Predictive Infrastructures with invited guests Ruth Catlow, Torange Khonsari and Kit Brabrooke at Crictial Media Lab Basel. Workshop Londond 2023 The hands-on workshop Towards Good Enough Prediction Workshop at Goldsmiths, University of London brought together London-based researchers (form institutions such as CUCR, Goldsmiths Design, HCI City, Design Innovation Loughborough University London) explore practices of data storying, citizen sensing and community-driven predictive algorithms. Its aim was to probe mutual research interest in just, community-driven algorithmic urban futures. Inaugural Lecture Viktor Bedö December 2022 SMUC PI Viktor Bedö gave his inaugural lecture ‘Design Friction for Care-based Urban Infrastructure’ along with Helen v. Pritchard and Budhaditya Chattopadhyay at the FHNW Academy of Arts and Design. Workshop Basel 2022 Labelling Friction Workshop at Critical Media Lab - ‘Family dinner from leftovers’, ‘Bowl for brunch’… Inspired by Vera van der Burg’s work on subjective labelling and co-facilitated by guest Iohanna Nicenboim, the semi-public Labeling Friction explores experimental labelling methods for community-based machine teaching. Workshop Basel October 2022 Automation And Privacy Workshop with activist David Sommer joins the SMUC.kitchen team for a workshop to explore feasible and speculative automation tools (such as linear algebra neuronal networks) and review privacy-related flags. Presentation London June 2022 Viktor Bedö presented From Small to Large: Frictions in Scaling Food Rescue at the Growth/Emergency: Re-Imagining Cities, Economies and Ecologies in the Time of the Anthropocene Symposium at UCL London. Workshop Basel June 2022 Cards For Food Rescue Workshop to develop the SMUC IoT Prototyping Cards. The aim was to develop ways of negotiating commoning-relevant data streams for algorithmic food rescue infrastructures. Workshop Kiel June 2022 Viktor Bedö hosted the workshop Design F(r)iction for Food Rescue Infrastructures at the Design x Sustainability Symposium of the German Society for Design Theory and Research. Workshop Amsterdam March 2022 Design F(r)iction for Predictive Food Rescue workshop engaged with urban infrastructure imaginaries to explore the potential of turning this resource into commons. The workshop activities incldued role-playing machine teaching, creating prototyping cards and writing fictious Tweets from the future. See workshop documentation. Workshop March 2022 With Jan Torpus, Felix Gerloff and Rebecca Geyer, Viktor Bedö co-hosted the Co-creation for Biodiversity. Post-anthropocentric Participatory Design in Urban Environments workshop at The Nature of Cities Festival. Workshop March 2022 Design F(r)iction for Predictive Food Rescue international workshop at the Civic Interaction Design research group of the Amsterdam University of Applied sciences. SMUC x HvA Master Digital Design: Cooperation. Basel/Amsterdam. November 2021 SMUC cooperates with the Master Digital Design at the Amsterdam University of Applied Sciences by providing a food-waste-related design challenge for a student team’s 2021 graduation project.

Viktor Bedö is a designer and researcher with a background in philosophy and more than 15 years of experience in critical reflection, playful prototyping, foresight and speculative design across academia and industry. His research practice is concerned with making- and fiction-based design methods invested in imaginaries of just and care-based urban infrastructures. He was a Visiting Professor at the FHNW Critical Media Lab from 2021 to 2024. Currently he is a Senior Teaching Fellow at the Institute Creative Futures at Loughborough University London.
Before joining the Critical Media Lab, Ozan worked as an architect, their work converges at the intersection of technology, politics, space and infrastructure. They are interested in the potential of everyday frameworks, tools and spaces to amplify marginalised voices. Their work encourages individuals to reconsider and negotiate their relationship with infrastructures that are both omnipresent yet often invisible.
Yann P. Martins is a coder and artist currently working at the IXDM. He is developing agent-based models for the project Thinking Toys for Commoning, Self Organizing Maps for the Architectonic Radio Explorations and also working on his PhD dissertation that looks at how capitalist mode of production and machine learning are re-enacting forms of inequity and discrimination. He also has started a teaching program at the Critical Media Lab that links technological education and cooking practices.